Interactive Session
Co-Chairs: Dmitry Berenson and Choi Hyouk Ryeol
Accepted Abstracts
1. Real-Time Grasping Planning for Robotic Kitting Applications, Jane Shi
2. Grasping With Your Brain: A Brain-Computer Interface for Fast Grasp Selection, Robert Ying, Jonathan Weisz, and
Peter K. Allen
3. Grasp Planning for Thin-Walled Deformable Objects, Nicolas Alt,
Jingyi Xu, and
Eckehard Steinbach
4. Axiomatic Scene Estimation for Robotic Manipulation, Zhiqiang Sui,
Odest Chadwicke Jenkins, and
Karthik Desingh
5. TWENDY-ONE's Hand: Combining the Benefits of Dexterity, Passive Compliance and Tactile Sensing, Alexander Schmitz,
Takashi Sato,
Satoshi Funabashi,
Sophon Somlor, and
Shigeki Sugano
6. Towards Stacking Objects with a Mobile Manipulator, Akansel Cosgun,
Heni Ben Amor, and
Henrik I. Christensen
7. Applied Force-based Multi-Fingered Grasping and Manipulation Control, Karl Van Wyk
8. Development of Probabilistic Models for Real-Time Perception of Geometric Features with a Sensorized Artificial Finger, Randall B. Hellman, and
Veronica J. Santos
9. G3DB: A Database of Successful and Failed Grasps with RGB-D Images, Point Clouds, Mesh Models and Gripper Parameters, Ashley Kleinhans,
Benjamin Rosman,
Michael Michalik,
Bryan Tripp, and
Renaud Detry
10. Generating Manipulation Trajectory Using Motion Harmonics, Yongqiang Huang and
Yu Sun
11. Identifying universal test objects for evaluating the performance of robotic end-effectors, Nadia G. Cheng,
William C. Culley, and
John R. Amend, Jr.
12. On Using Optimization-based Control instead of Path-Planning for Robot Grasp Motion Generation, Robert Krug,
Todor Stoyanov,
Vinicio Tincani,
Henrik Andreasson,
Rafael Mosberger,
Gualtiero Fantoni,
Antonio Bicchi, and
Achim J. Lilienthal
Demo Session
Co-Chairs: Oliver Brock, Leif Jentoft, Hyungpil Moon, and Yu Sun
Accepted Demos
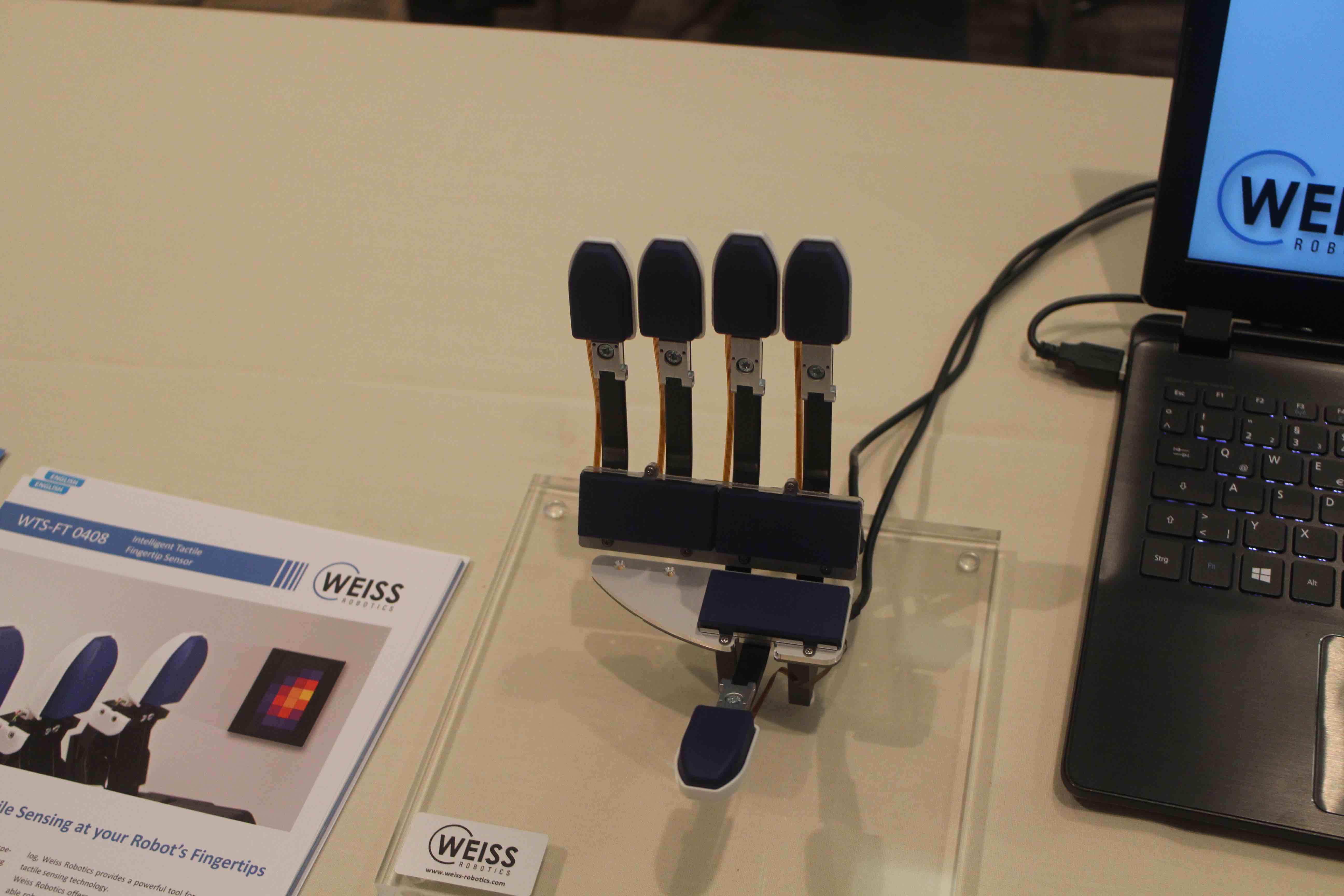
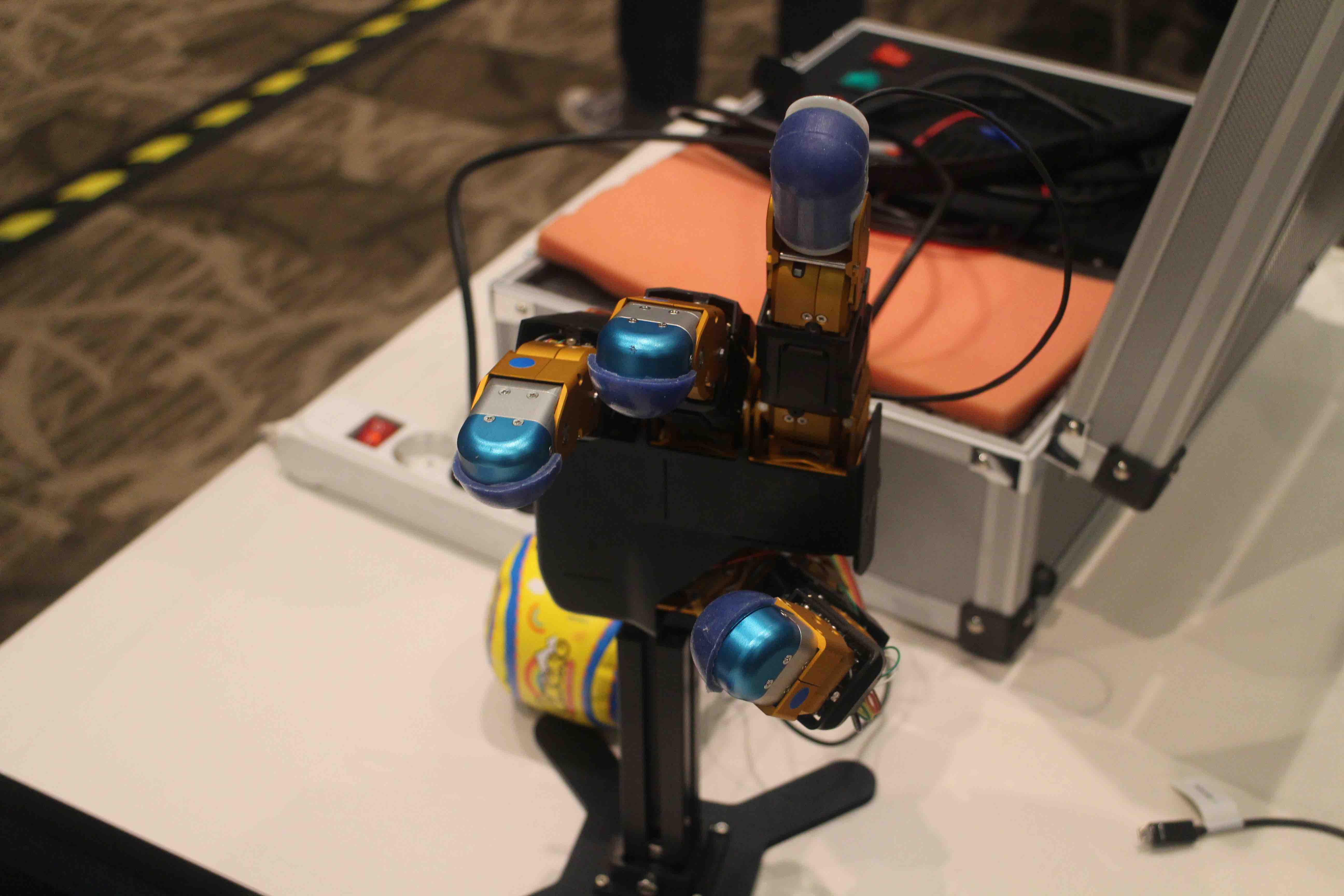
1. The Future of Machine Touch, SynTouch LLC.
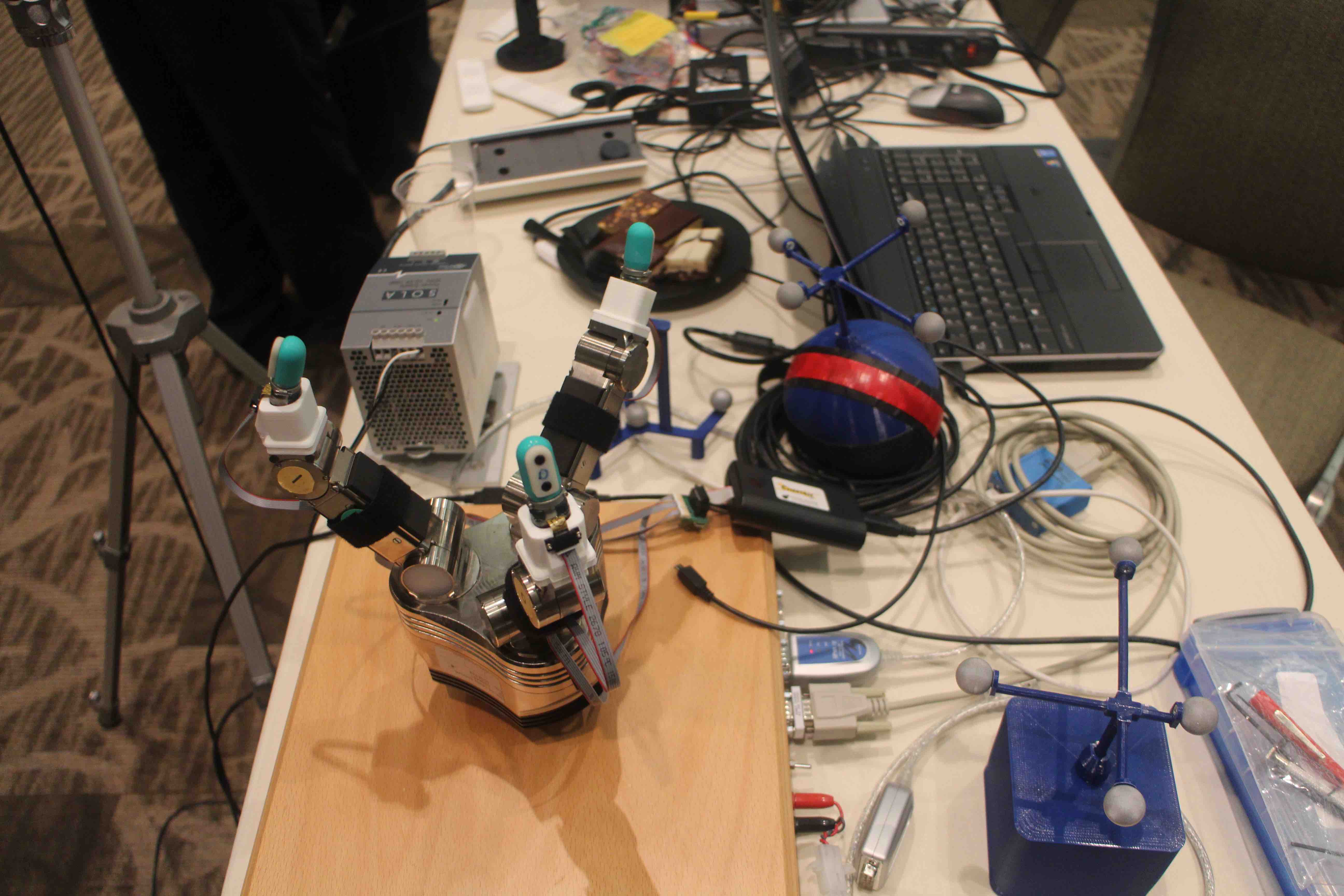
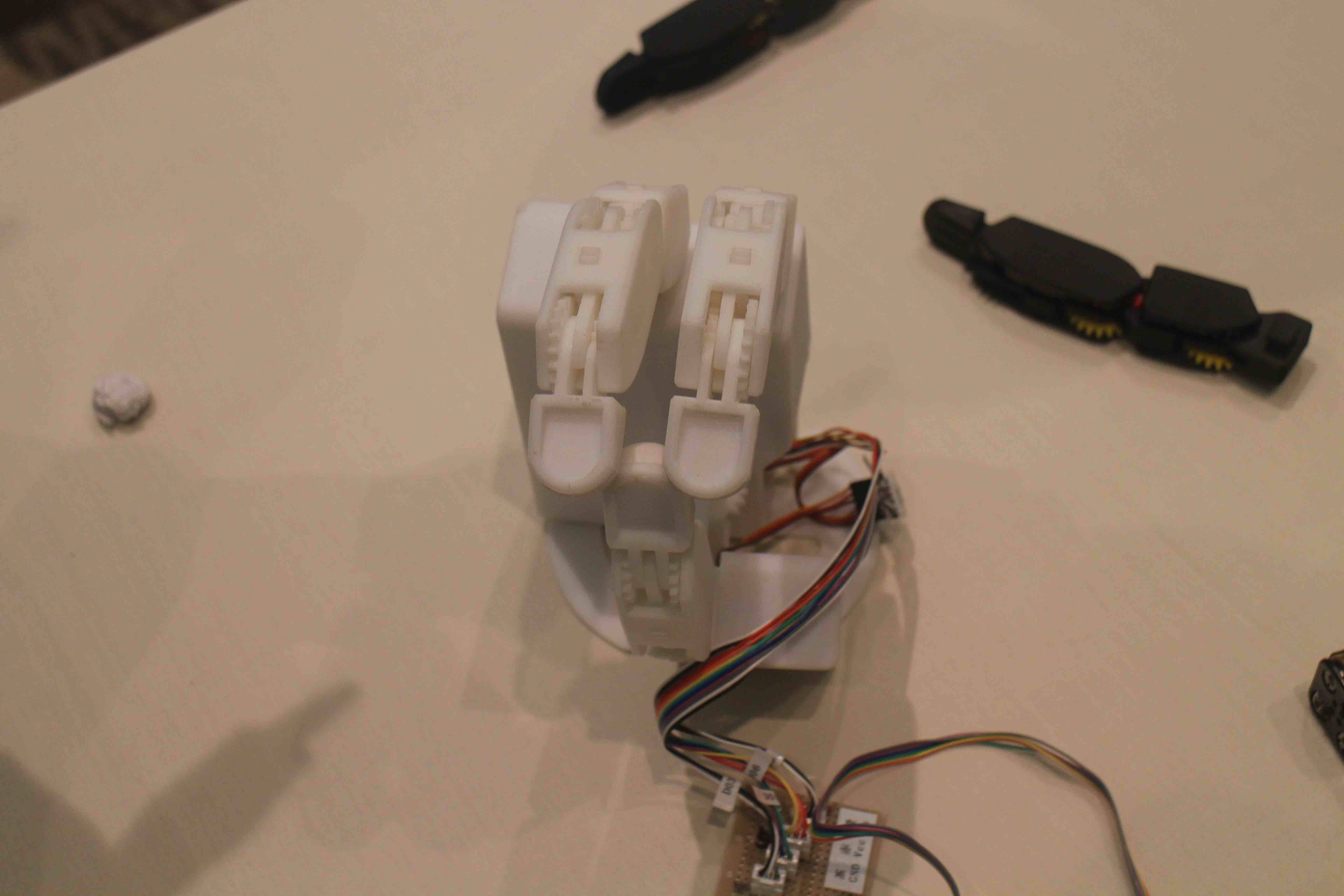
2. Demonstration of SKKU Hand with Fingertip F/T Sensors, Dongmin Choi, Ja Choon Koo, Hyouk Ryeol Choi and Hyungpil Moon
3. Demonstration: Robotic Hand Performance Tests, National Institute of Standards and Technology (NIST)
4. Temporally Synchronized Synergies for Anthropomorphic Control of a Dexterous Robotic Hand via Electromyogram, Benjamin Kent and Erik D. Engeberg
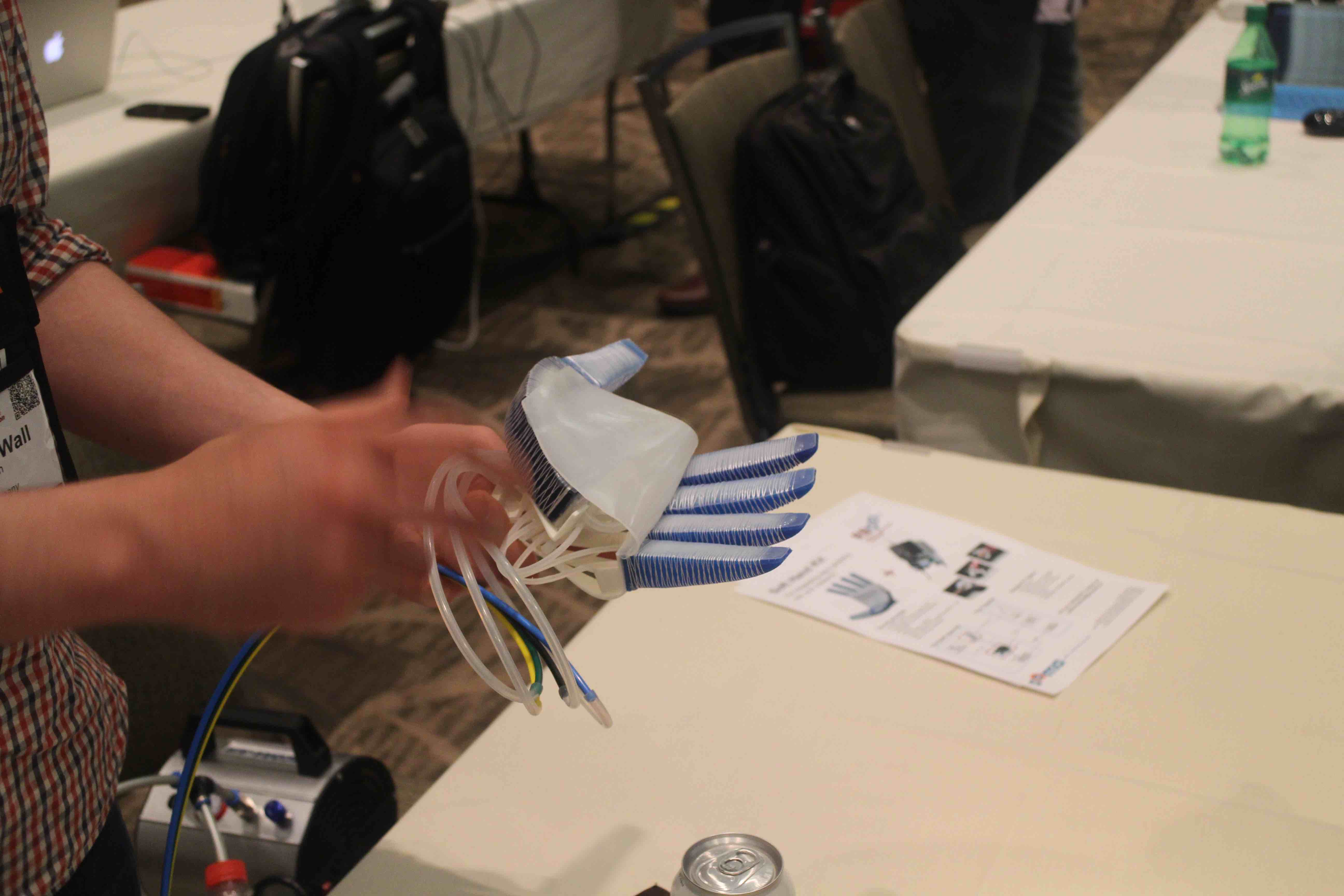
5. The Soft Hand toolkit, Vincent Wall, Raphael Deimel, and Oliver Brock
6. BarrettHandTM BH8-282 with Perception PalmTM Sensor Package, Barrett Technology
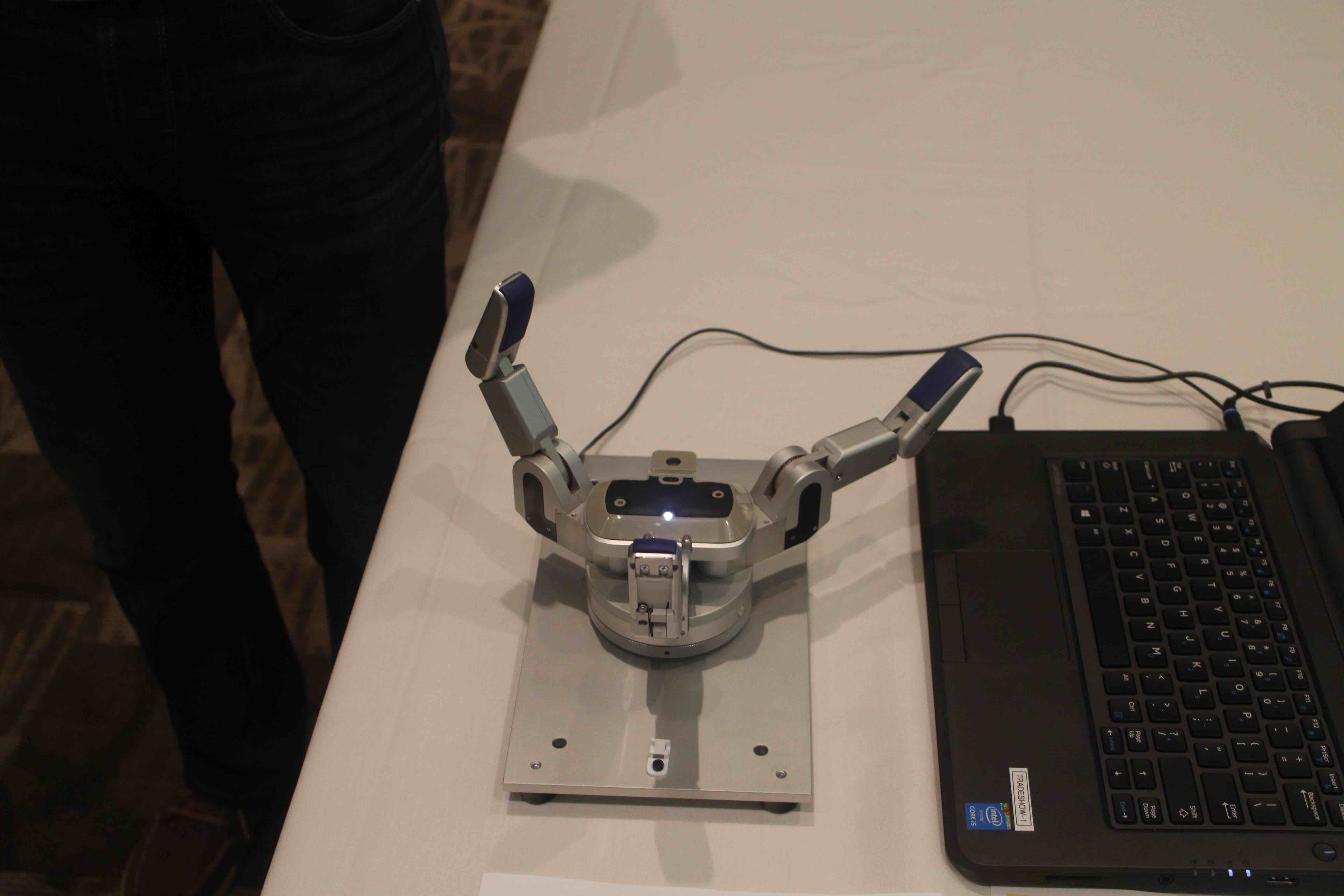
7. The Grasp Acquisition Strategy of the Velvet II, Vinicio Tincani, Todor Stoyanov, Robert Krug, Manuel Catalano, Giorgio Grioli, Achim Lilienthal, Gualtiero Fantoni and Antonio Bicchi
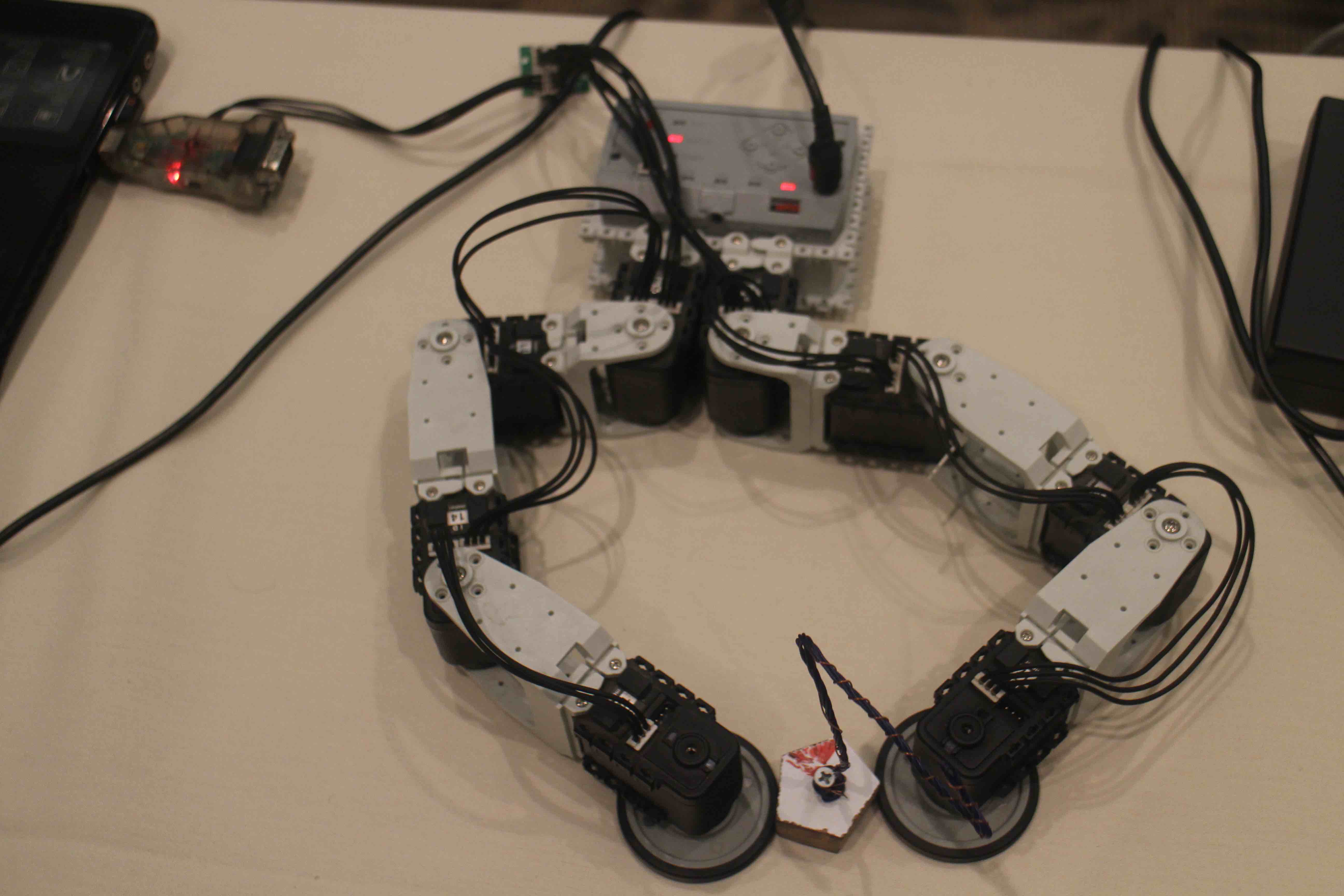
8. A Planar (2D) Wheeled-tip Robotic Hand: Dexterous Object Manipulation with Unlimited Rolling Contacts, Ehsan Noohi, Hadi Moradi, Sina Parastegari and Majid Nili Ahmadabadi
9. Hands-off measurement of robot manipulation performance, A. Huam'an Quispe
10. A Miniature F/T Sensor for Fingertip, Hyouk Ryeol Choi
11. Standardized Hardware for Advanced Manipulation Research, Leif Jentoft, Yaroslav Tenzer, Lael Odhner